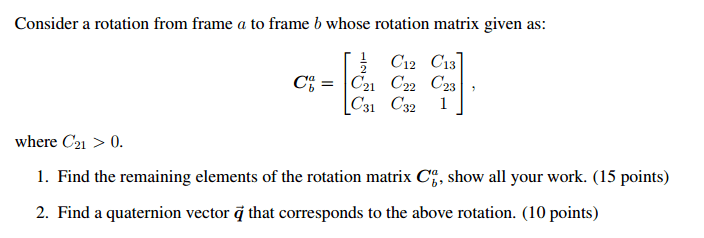
Consider a rotation from frame a to frame b whose rotation matrix given as: C^a_b = [1/2 C_21 C_31 C_12 C_22 C_32 C_13 C_23 1], where C_21 > 0. 1. Find the remaining elements of the rotation matrix C^a_b, show all your work. 2. Find a quaternion vector q that corresponds to the above rotation.
Show transcribed image textConsider a rotation from frame a to frame b whose rotation matrix given as: C^a_b = [1/2 C_21 C_31 C_12 C_22 C_32 C_13 C_23 1], where C_21 > 0. 1. Find the remaining elements of the rotation matrix C^a_b, show all your work. 2. Find a quaternion vector q that corresponds to the above rotation.