Kinesiology 2241A/B Lecture Notes - Lecture 7: Proprioception, Anti-Gravity, Vestibular System

27 Mar 2018
School
Department
Course
Professor
Document Summary
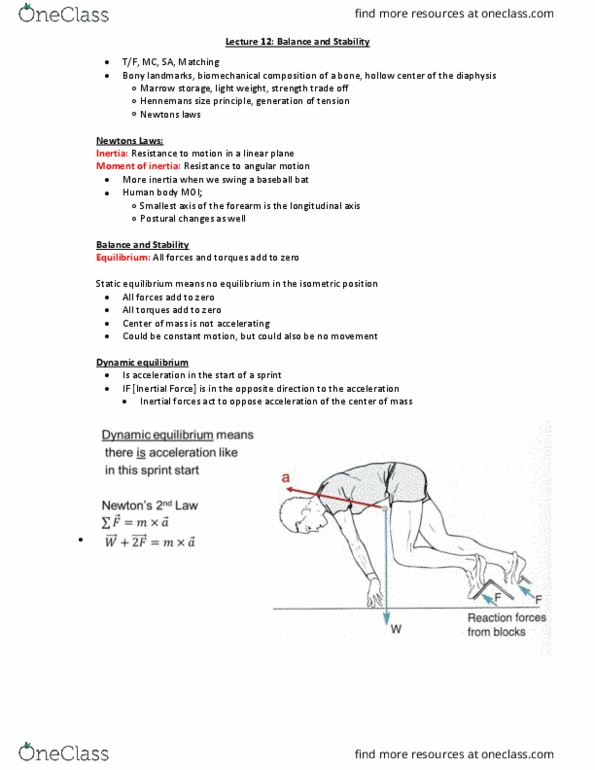
Static equilibrium means there is no acceleration (such as an isometric position) Inertial forces act to oppose any accelerations of the com. These are the for(cid:272)es that you (cid:858)feel(cid:859) whe(cid:374) you are perfor(cid:373)i(cid:374)g a task with a(cid:272)(cid:272)eleratio(cid:374) This runner who is turning to his left, he feels the inertial force downward and to his right, the opposite of the acceleration of his com. He is in dynamic equilibrium and is accelerating. You are always in equilibrium and it really has nothing to do with stability. Just because you are in equilibrium does not mean that you are stable. How (cid:272)lose the syste(cid:373) is to (cid:858)wipi(cid:374)g out(cid:859); a(cid:272)(cid:272)elerati(cid:374)g at a (cid:373)ag(cid:374)itude or dire(cid:272)tio(cid:374) that you do(cid:374)(cid:859)t wa(cid:374)t. Linear stability and rotary stability cannot be separated, they describe how you will wipe out if you lose control. Stability is often related to the size of the base of support.