ELE 302 Lecture Notes - Lecture 31: Damping Ratio, Pid Controller, System Model

19 Oct 2017
School
Department
Course
Professor
Document Summary
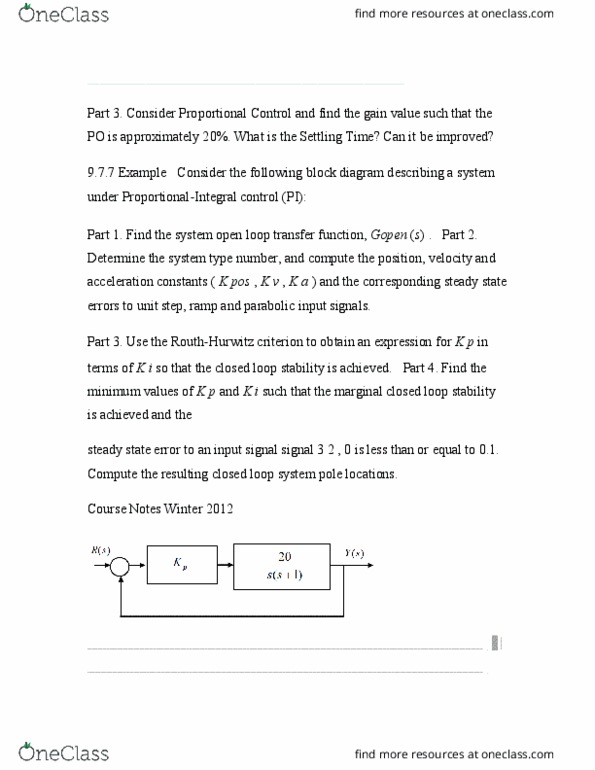
The integral gain ensures that the steady state error drops to zero as the. However, the pi + rate feedback (as well as the pid controller) scheme adds a zero to the closed loop transfer function. Depending on the actual location of the zero, if it is in the significant region of the s plane, its presence will increase the system overshoot. If that is the case, and there is no flexibility in the po specification, a different controller design is required, using multiple feedback loops. Such design is beyond the scope of this course. Note that both in this example, the computed value of the derivative (rate. The main controller gain is always the proportional gain. Ignoring the disturbance, the transfer function of the inner feedback loop can be calculated as: Alternatively, use the mason"s gain formula: two loops in this system: l d s.