ELE 302 Lecture Notes - Lecture 28: Settling Time, Block Diagram, Pid Controller

19 Oct 2017
School
Department
Course
Professor
Document Summary
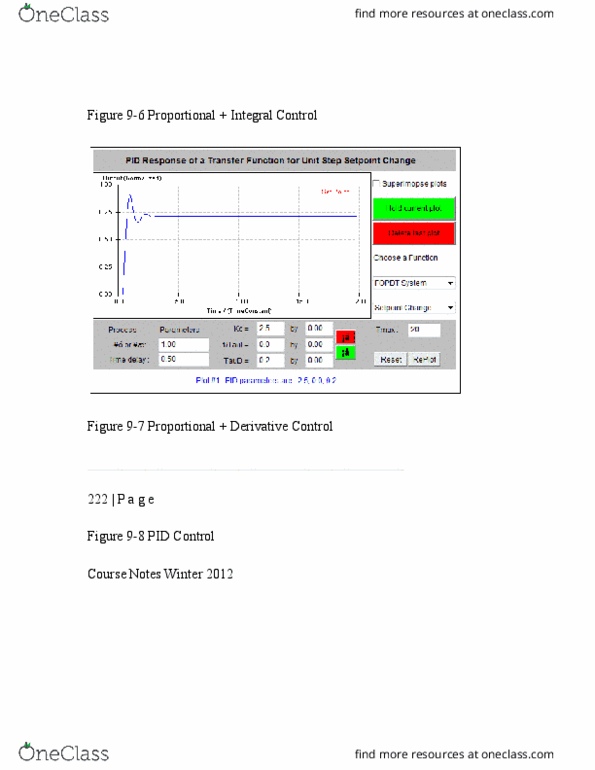
Consider proportional control and find the gain value such that the. 9. 7. 7 example consider the following block diagram describing a system under proportional integral control (pi): Find the system open loop transfer function, gopen (s) . Determine the system type number, and compute the position, velocity and acceleration constants ( k pos , k v , k a ) and the corresponding steady state errors to unit step, ramp and parabolic input signals. Use the routh hurwitz criterion to obtain an expression for k p in terms of k i so that the closed loop stability is achieved. Compute the resulting closed loop system pole locations. 9. 7. 8 example consider a closed loop position control system working under proportional + rate feedback control, as shown below. 1) find the closed loop system transfer function in terms of controller gains and. 2) determine values of controller gains such that po = 10% and.